
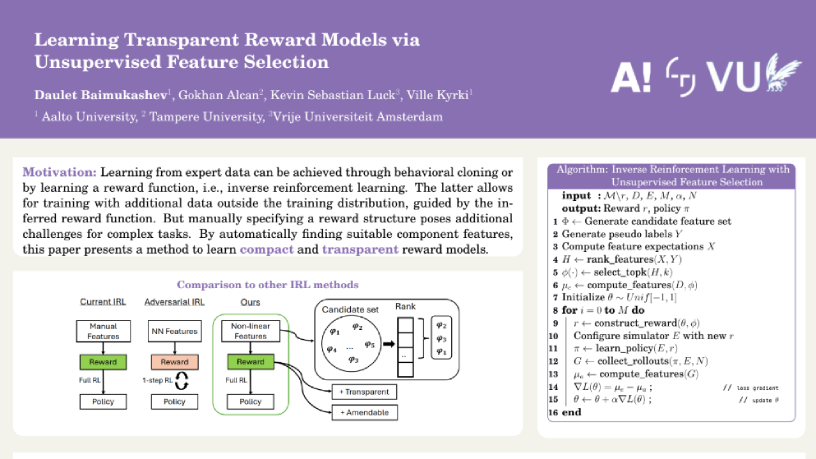
Learning Transparent Reward Models via Unsupervised Feature Selection
Daulet Baimukashev, Gokhan Alcan, Kevin Sebastian Luck, Ville Kyrki
Conference on Robot Learning (CoRL 2024)
[Project Website] – [Code] – [Paper]
Paper Accepted: Learning Transparent Reward Models via Unsupervised Feature Selection
Our paper “Learning Transparent Reward Models via Unsupervised Feature Selection” has been accepted for presentation at the Conference on Robot Learning (CoRL 2024) November 6-9, Munich, Germany!