
Duration: 2024-2027
Programme: HORIZON.2.4 – Digital, Industry and Space
Topic: HORIZON-CL4-2023-DIGITAL-EMERGING-01-02: Industrial leadership in AI, Data and Robotics – advanced human robot interaction (AI Data and Robotics Partnership)
CORDIS Link: Click here
Project page: Click here
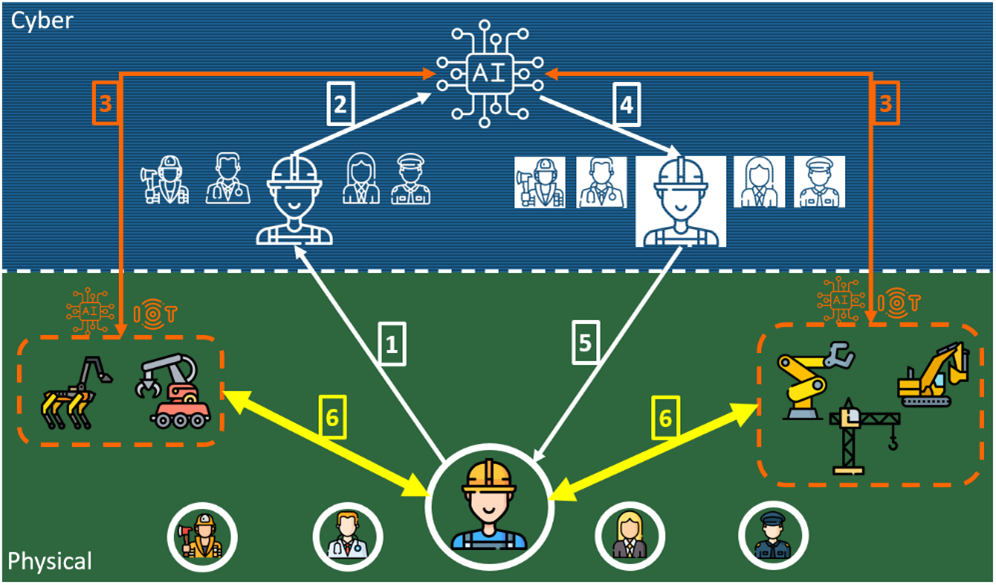
FORTIS specifically focuses on providing a complete Human-Robot Interaction (HRI) solution that includes multi-modal communication and multi-aspect interaction. The goal is to develop a human-centric solution that addresses the needs of both the human workforce and the robots, allowing them to work together efficiently and safely. With cutting-edge research and advanced technology, this solution can help to mitigate the negative effects of an aging workforce on employment, working conditions, and welfare in the EU.
The project will conduct three main pilots in the sectors of construction, infrastructure services, and manufacturing. These pilots will provide a total of 5 use cases to demonstrate the effectiveness and safety of the Human-Robot Interaction.
Moreover, FORTIS will allocate a portion of the budget to finance pilots that allow civilians to interact with the robots in different settings, such as healthcare, public events, shopping centres, and grocery stores. This will provide an opportunity to evaluate the performance of the HRI solution in various real-world scenarios.
Objectives
- Develop, integrate, and provide a human-centric solution for modelling and analysing humans and their activities. This will allow robots (or embodied AI entities) to interact with humans at all levels (physical and non-physical).
- Develop, reuse, and provide a flexible and agile multi robotic-centric solution which can work humans. This will allow safe and trustworthy human robot collaboration (physical interaction) where humans can trust and depend on the intelligibility of the robotic system.
- Integrate and provide the FORTIS solution where a safe and trustworthy Human-Robot interaction is guaranteed and provide an optimised operations for both humans and robots.
- Demonstrate the FORTIS solution on industrial setup pilots where the interaction between human and robot can be conducted at all levels (physical and non-physical) with variety of environments.
Impact
- Scientific: creating new knowledge regarding the effect of technologies on human and especially on workers. Extend the state of the art with human-centric technologies that can mimic the human in the interaction.
- Societal: improving the overall acceptance of using technology at work. Improving the trust between he human and the robot and AI. Providing a solution for citizen to engage and interact with robots in a human-friendly way.
- Economic: provide support for third parties in sectors related to human-robot interaction. Contribute to creating solution that can put EU in a leading position in relation to HRI.
Role of FAST-Lab.
- Leader of WP4: FORTIS Approach: Trustworthy Human-Robot Collaboration
- Leader of T1.4: Planning the development and integration of FORTIS solution
- Leader of T2.4: Adaptive human-robot multi-modal communication
- Leader of T3.3: Robotic behavioural intelligibility and adaptation
- Leader of T4.2: FORTIS Digital Twins
- Leader of T8.3: Technical Management: Leadership and Technical WP Reporting
Consortium
Coordinator:
- FUNDACION TECNALIA RESEARCH & INNOVATION: Spain
Participant Organizations:
- FAST-Lab./TAMPEREEN KORKEAKOULUSAATIO SR: Finland
- AGENCIA ESTATAL CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Spain
- FONDAZIONE BRUNO KESSLER: Italy
- INGENIARIUS LDA: Portugal
- XLAB RAZVOJ PROGRAMSKE OPREME IN SVETOVANJE DOO: Slovenia
- ROBOTNIK AUTOMATION SL: Spain
- FACTOR SOCIAL – CONSULTORIA EM PSICO – SOCIOLOGIA E AMBIENTE LDA: Portugal
- Garcia, Garcia S.A.: Portugal
- F6S NETWORK IRELAND LIMITED: Ireland
- VIAS Y CONSTRUCCIONES SA: Spain
- ARCELIK A.S.: Türkiye

This project has received funding from the European Union’s Horizon Europe research and innovation programme under grant agreement No. 101135707. Neither the European Commission(EC) or any person acting on behalf of the commission is responsible for how the following information used. The views expressed in this publication are the sole responsibility of the authors and do not necessarily reflect the views of the EC.