
Abstract: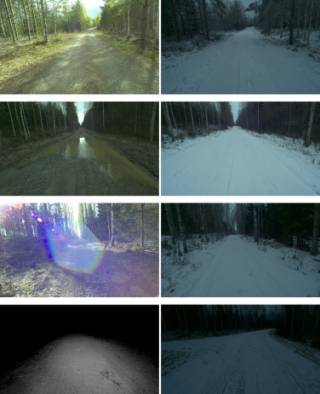
This paper presents a novel challenging dataset that offers a new landscape of testing material for mobile robotics, autonomous driving research, and forestry operation. In contrast to common urban structures, we explore an unregulated natural environment to exemplify sub-urban and forest environment. The sequences provide two-natured data where each place is visited in summer and winter conditions. The vehicle used for recording is equipped with a sensor rig that constitutes four RGB cameras, an Inertial Measurement Unit, and a Global Navigation Satellite System receiver. The sensors are synchronized based on non-drifting timestamps. The dataset provides trajectories of varying complexity both for the state of the art visual odometry approaches and visual simultaneous localization and mapping algorithms. The full dataset and toolkits are available for download at: http://urn.fi/urn:nbn:fi:att:9b8157a7-1e0f-47c2-bd4e-a19a7e952c0d. As an alternative, you can browse for the dataset using the article title at: http://etsin.fairdata.fi.
