


AI Hub Tampere’s live demo season started after a break caused by the Covid-19 pandemic. There could be no better timing to arrange a demo day together with FIMA. This time, we wanted to help companies to try before buying, and provide a glance at some of the newest radar and lidar equipment. The demo afternoon started in Konetalo, Hervanta, with attendees representing various technology companies.
Read our event summary below.

After prof. Reza Ghabcheloo‘s opening intro, TAU Doctoral Student Prashant Rai started with a presentation of the hardware used in the demo: Texas Instruments, Vayyar and Robosense. There is a large variety of technology providers in this sector. Some of them are listed in the image below:

Next, the technologies were explained in more detail. Radio detection and ranging uses radio frequency waves to estimate the range, angle and Doppler velocity of the target by emitting chirp signals. The perceived time delay indicates distance. Different types of devices can perform best in different tasks so it is possible to choose the optimal one from a list of different sensors.
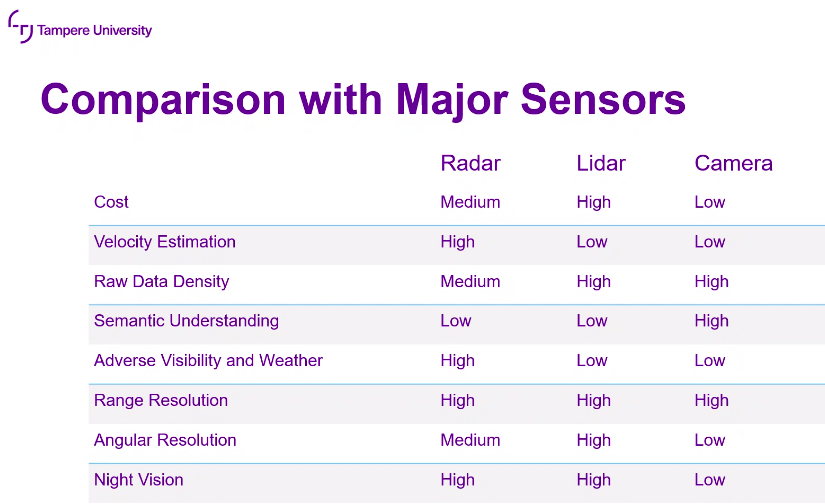
4D Imaging Radar is a high-resolution sensor technology that uses elevation as an extra dimension when compared to traditional automotive radars. This means that the signal covers also the height of objects, giving an advantage over 3D radars. The radar perceives a data cube ((Analog-to-Digital mmwave signal or ADC), which draws its values from four dimensions. Processing of the data cube provide us the reflection intensity and Doppler velocity of the targets in a 4 dimensional frame. This technology has an advantage over optical sensors(Camera and Lidar) in adverse visibility and bad weather where the radar can percieve the environment while other sensors cannot perform well. It can be beneficial when developing driver assist systems and self-driving vehicles.

Some typical sources of disturbance may include multipath reflection or ground clutter in front of the antenna. The filtering, setup and calibration processes were explained. The signal, or Radar Cross Section (RCS) is affected by the surroundings, for example material, area, structure and object position. The intensity varies according to these. Finally, what needs to be solved is the visualisation, signal processing and documentation (with Vayyar).
The demo audience group then moved to Festia hall lobby to see some live demostration on the devices.

We hope to increase company knowledge on devices and offer the opportunity to run tests with the university facilities. Follow us on Twitter (@AI_Hub_Tampere) and Eventbrite to hear about our future events.
Text by Ritva Savonsaari