
![]()

![]()

![]()
We seek ideas for imaginative projects.
Ongoing projects.
FAIRY
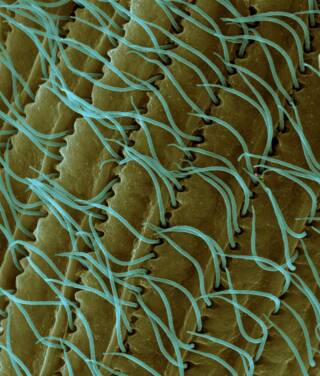
 Recently, light-responsive soft materials have proven their unique ability of actuation, providing novel approaches for miniaturization of soft robots by powering them wirelessly through remotely controlled light beam(s). This has led to demonstrations of versatile light-driven robots that can walk, swim, jump, etc. FAIRY will take a significant leap in material science to develop small-scale light driven flying robots with adaptive features inspired by biological organisms. Funding source: Academy of Finland. Photo credit: Jianfeng Yang. Related publications, dandelion (Yang, 2023), maple seed (Yang, 2024), dandidrone (Yang, 2025).
Recently, light-responsive soft materials have proven their unique ability of actuation, providing novel approaches for miniaturization of soft robots by powering them wirelessly through remotely controlled light beam(s). This has led to demonstrations of versatile light-driven robots that can walk, swim, jump, etc. FAIRY will take a significant leap in material science to develop small-scale light driven flying robots with adaptive features inspired by biological organisms. Funding source: Academy of Finland. Photo credit: Jianfeng Yang. Related publications, dandelion (Yang, 2023), maple seed (Yang, 2024), dandidrone (Yang, 2025).
Communication in robotic materials
In biological context, communication refers to interactive behaviour of one organism affecting the current or future behaviour of another. In the context of bioinspired materials, the ERC-StG project (ONLINE) aims to develop new concepts of communication between inanimate materials. These artificial materials will be able to sustain their mechanical motion when they are not in thermodynamic equilibrium. Leveraging this self-oscillation concept, ONLINE’s goal is to design soft robots that sustain their own movement, make their own decisions and adapt to their environmental conditions, without human control. Funding source: ERC Starting Grant 2022 (ONLINE). Related publications: feedback (Yang, 2025), emergence (Guo, 2025), light communication (Guo, 2025)
BioDrones
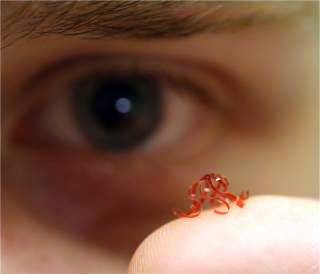
 The goal ofthis consortium project funded by Jane & Aatos Erkko Foundation is to develop a completely new type of biodegradable drone powered by wind energy. Only about a centimeter long and weighing less than a gram, these drones are made from a material that helps them hover even in a light breeze and respond to environmental changes, such as shifts in light or humidity. They do not require a power source. Instead, they can independently take off and land, fly, and navigate—for example, by orienting toward the sun—bringing what once seemed like science fiction closer to reality. Project co-PI: Associate Professor Yinyin Bao (University of Helsinki). Funding source: The Jane and Aatos Erkko Foundation. Related publications: just started, stay tuned.
The goal ofthis consortium project funded by Jane & Aatos Erkko Foundation is to develop a completely new type of biodegradable drone powered by wind energy. Only about a centimeter long and weighing less than a gram, these drones are made from a material that helps them hover even in a light breeze and respond to environmental changes, such as shifts in light or humidity. They do not require a power source. Instead, they can independently take off and land, fly, and navigate—for example, by orienting toward the sun—bringing what once seemed like science fiction closer to reality. Project co-PI: Associate Professor Yinyin Bao (University of Helsinki). Funding source: The Jane and Aatos Erkko Foundation. Related publications: just started, stay tuned.
Laser writing micro fabrication
 For infinite amount of research assistant/summer student project, we also let the students to fabricate anyhing, as long as they are small and oscillating. Instrument: 2 photon lithography, UpNano (ERC investment). Contact person: the 2pp master, Leilei Song, leilei.song@tuni.fi. Related publications: micro mirror (Song, 2026)
For infinite amount of research assistant/summer student project, we also let the students to fabricate anyhing, as long as they are small and oscillating. Instrument: 2 photon lithography, UpNano (ERC investment). Contact person: the 2pp master, Leilei Song, leilei.song@tuni.fi. Related publications: micro mirror (Song, 2026)
Past projects.
OPTOPUS
 Soft robotics offers technical innovations to overcome the grand challenges encountered in conventional rigid machines that relate to adaptive motion and safety concerns. However, presently available actuation and control strategies prevent device miniaturization. OPTOPUS aims at developing a new type of wireless soft robotic system with overall size in a millimetre range, that is capable of sophisticated functions when fuelled by light energy only. Drawing from physics, microrobotics, chemistry and material science, we devise soft-bodied robots that perform jumping and 2D locomotion steering with light, as well as miniature actuators that can recognize and grasp objects based on their colours
Soft robotics offers technical innovations to overcome the grand challenges encountered in conventional rigid machines that relate to adaptive motion and safety concerns. However, presently available actuation and control strategies prevent device miniaturization. OPTOPUS aims at developing a new type of wireless soft robotic system with overall size in a millimetre range, that is capable of sophisticated functions when fuelled by light energy only. Drawing from physics, microrobotics, chemistry and material science, we devise soft-bodied robots that perform jumping and 2D locomotion steering with light, as well as miniature actuators that can recognize and grasp objects based on their colours