

Networked Robotics Laboratory (NeBoLab)
NeBoLab offers a platform for researchers and students to study and work with robotics experiment involving multiple and heterogeneous robotic systems.
Multi-agent (robot) is an interdisciplinary research area attracting different scientific communities, including
- Robotics/automation: multi-robot systems, connected vehicles
- Physics and computer science: swarm behavior
- Social network: crowd dynamics
In NeBoLab, we are developing an experimental system which allows smooth transition from formulation/algorithm design to implementation in our robotic system, irrespective of the researchers’ background.

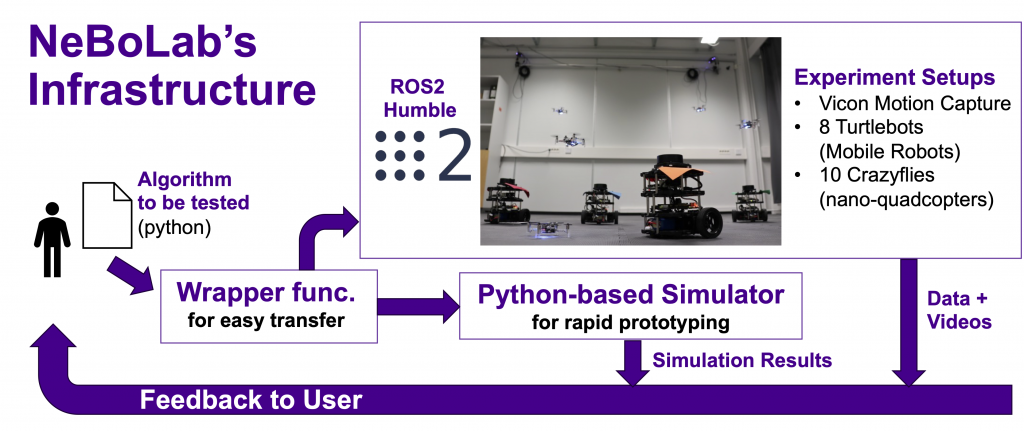
NeBoLab currently consists of the following robotic systems:
- Mobile robots (6 TurtleBot3 Burger and 2 TurtleBot3 Waffle with manipulator)
- Quadcopters (10 Crazyflie 2.1 equipped with different decks and 1 Parrot Anafi drone)
- ZED 2 Stereo camera
- VICON motion capture cameras for global localization
- Digital twin
IINES group is actively offering topics for courses (Robotics Project Work) and thesis (bachelor, master, doctoral levels) which utilize the experimental testbed in NeBoLab.
To interested students: If you have ideas/topics in mind for your robotics project work course, or your bachelor/master thesis related to the (multi-)robot scenario and would like to discuss further/complete your thesis in our group, feel free to contact Azwirman Gusrialdi .
Note: This page will be updated regularly with the demos/results done by our students/researchers (stay tuned!)
Fun fact: In Japanese the word nebo (寝坊) means “late riser” or “oversleeping”. One of the reasons to name our robotic lab as nebolab is to motivate us to develop experimental system which is easy to use for everyone, and possibly can be operated remotely (imagine that you oversleep and you have to rush to complete your experiment).
Experiment/Simulation Results (Demos)
1. Potential field based obstacle avoidance experiments with crazyflies
- First experiment: the quadcopter has to fly to the specified goal position while avoiding static obstacles.
- Second experiment: two quadcopters have to exchange their positions while avoiding collision among themselves.
2. Resilient leader-following consensus experiments with turtlebots
We propose a novel resilient leader-follower consensus algorithms against cyber-attacks. The objective is to ensure that all the robots meet at a common location (with a biased introduced to avoid collision, at least in the final position) under unknown attacks on the robots’ actuators, in this example the adversary inserted injections into the actuator of the blue and green robots.
3. Persistent monitoring with a network of quadrotors for indoor farming application
In this simulation, a network of autonomous quadrotors persistently monitor the coverage holes generated by a number of broken static sensors in an indoor farming scenario.
4. Communication-efficient formation maintenance for multi-robot system with a safety certificate
We propose a novel cooperative control algorithm for coordinating multiple robots in achieving several control objectives (subtasks). To this end, we utilize control barrier function to describe the subtasks in combination with QP-based controller to provide a safety certificate. Moreover, a novel group collision avoidance algorithm is proposed to reduce the required communication between the robots.
- Scenario 1: A group of four robots need to go to a pre-defined goal position while maintaining their rigid formation and avoiding static obstacles along the way.
- Scenario 2: Two-robot formations need to go to the pre-defined goal positions while maintaining their rigid formation and avoiding collision with the other group formation.
5. LiDAR-based safe navigation for mobile robot in unknown environment
We propose a novel method via a combination of Gaussian Process Regression and Control Barrier Function which allows a mobile robot navigate safely using LiDAR in unknown environment consisting of static and dynamic obstacles.
6. Safe navigation of flexible formation of multi-robot systems in unknown environment
We propose a novel method via Control Barrier Function which allows a formation of multi-robot systems to automatically and cooperatively modify their formation shape within the specified distance tolerance for safe navigation in unknown environment using on-board sensor.
7. Human-Drone Swarm Interaction System for Persistent Monitoring of Large Disperse Area
We develop a human-drone swarm interaction system that enables adaptive and prioritized monitoring through an ergodic coverage control algorithm. The system is designed to ensure that drone swarms effectively cover a user defined probability density function while maintaining both safety and persistent monitoring.
8. Circulation-embedded control barrier function for safe navigation
We develop a novel control strategy to address fundamental issues observed in the standard control barrier function based approach for safe navigation such as being trapped in potential undersired equilibria, slowing down near obstacles, and dysfunctional circulation observed in the related work which aim to tackle the same issue. The proposed idea is also able to deal with a scenario involving multi-robot deadlock without requiring communication.
9. Two-layer control architecture for Persistent Monitoring of Large Disperse Area
We propose two-layer control architecture consisting of task allocation and Voronoi-based converage control for persistent monitoring using drone swarm.
10. Collaborative Object Transportation Using Pairs of Differential-Drive Robots
We propose control design for collaborative object transportation using pairs of differential-drive robots via control barrier functions.