
Our group is currently focusing on the following research topics:
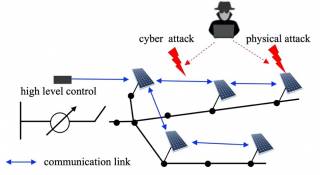
Resilient distributed control & optimization of CPS against cyber-attacks
Motivation: While the extensive use of ICT (Information and Communication Technology) facilitates the design and implementation of scalable (distributed) optimization & control algorithms, the growing complexity in the adopted communication technologies and the greater exposure to external networks (such as internet) may unintentionally impose the CPS to cyber-threats. As a result, the physical systems may be damaged as witnessed by the attack on the Ukraine power grid in 2015 causing a six-hour blackout and affecting hundreds of thousands of customers. Unfortunately, traditional security solutions in the ICT domain, focusing on data secrecy, integrity, and availability, are not sufficient to ensure safety of the CPS.
Goal: design of resilient distributed control algorithms for ensuring optimal and safe operation of CPS in the presence of unknown physical and cyber-attacks.
Related project: https://www.tuni.fi/en/research/resilient-distributed-optimization-cyber-physical-systems
Data-driven control of complex systems
Motivation: System’s modeling is an important step in designing control algorithm for dynamical systems. However, it is often not possible or very difficult to obtain the dynamical model of a complex system in practice due to e.g., frequent changes in parameters and topologies as observed in power system, or its interaction with unknown environment as exemplified by a wheel loader (mobile machine). Huge amount of historical and real-time data generated by various sensors deployed in the complex system provides an opportunity for designing data-driven algorithm for controlling such complex systems. Recently, tools from machine learning have been widely utilized for this purpose. However, these methods in general are lacking of stability or safety certificate which is crucial for safety critical systems.
Goal: Develop scalable data-driven control algorithms for complex systems with a safety certificate

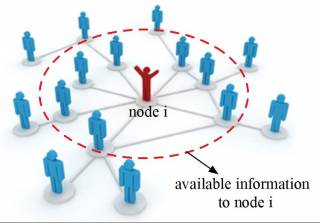
Distributed algorithms for analysis and control of network’s structure in complex systems
Motivation: Network’s structure and its properties (e.g., connectivity, eigen information) play a crucial role in establishing the stability of complex systems and ensuring the convergence of many distributed optimization/control/estimation algorithms. However, in practice knowledge on the overall network’s structure is not available, for example due to privacy concern. This makes it impossible to apply the standard methods for analyzing and controlling (e.g., adding, removing, rewiring edges) the network’s structure.
Goal: develop novel distributed algorithms for analyzing and controlling a given metric of interest related to network’s structure while preserving individual node’s privacy
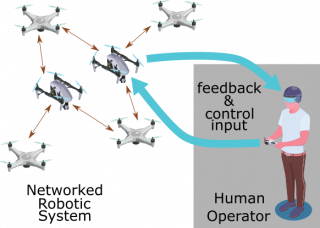
Control of human-robotic network team
Motivation: Robots have strength in fast data processing and are also able to work in hazardous environments that human cannot enter. In addition, technological advances and the development of relatively inexpensive communication, computation and sensing devices facilitate the deployment of a network of robots to perform tasks in a cooperative manner. In contrast to a single robot, the deployment of a team of robots is advantageous since it provides robustness to robot failures and makes it possible to handle complex tasks more effectively. However, ensuring the safe operation of a network of robots under uncertainty in unknown environments is a very challenging task. Moreover, humans are still superior to autonomous robots in adapting to environmental changes or uncertainties due to their high cognitive ability. Therefore, it is natural to combine the strengths of human and robots to ensure optimal operation of networked robotic system.
Goal: develop interaction algorithms for a team of a human operator and a robotic network that ensure the safety and optimal operation of a robotic system
Applications
We have been working on developing cooperative control algorithms for the following applications:
Intelligent Transportation Systems (Smart Mobility):
- Cooperative scheduling and control algorithm for charging of electric vehicles (EVs): The goal is to coordinate the charging of EVs such that the total waiting time is minimized over the whole charging network. The proposed algorithm can be implemented as a recommendation system to the EVs.
- Connected vehicles’ platooning
- Horizontal transportation in maritime container terminals
Power Systems (Smart Grid):
- Distributed data-driven algorithms for estimating inter-area oscillation in power system
- Resilient cooperative voltage control against cyber-attacks for distributed network with high penetration of renewable energy resources
Robotic Network:
- Cooperative control algorithms for robotic sensor network
- Cooperative control algorithms for warehouse automation
- Human-robot(s) interaction algorithms
- Persistent monitoring for indoor farming using robotic sensor network
Epidemic Spreading:
- Distributed algorithms for estimating and slowing down epidemic spreading via network topology manipulation