Y. Lu*, M. Koivisto*, J. Talvitie*, E. Rastorgueva-Foi*, T. Levanen†, M. Valkama*, and E. S. Lohan*
* Department of Electrical Engineering, Tampere University, Finland
† Nokia Mobile Networks, Tampere, Finland
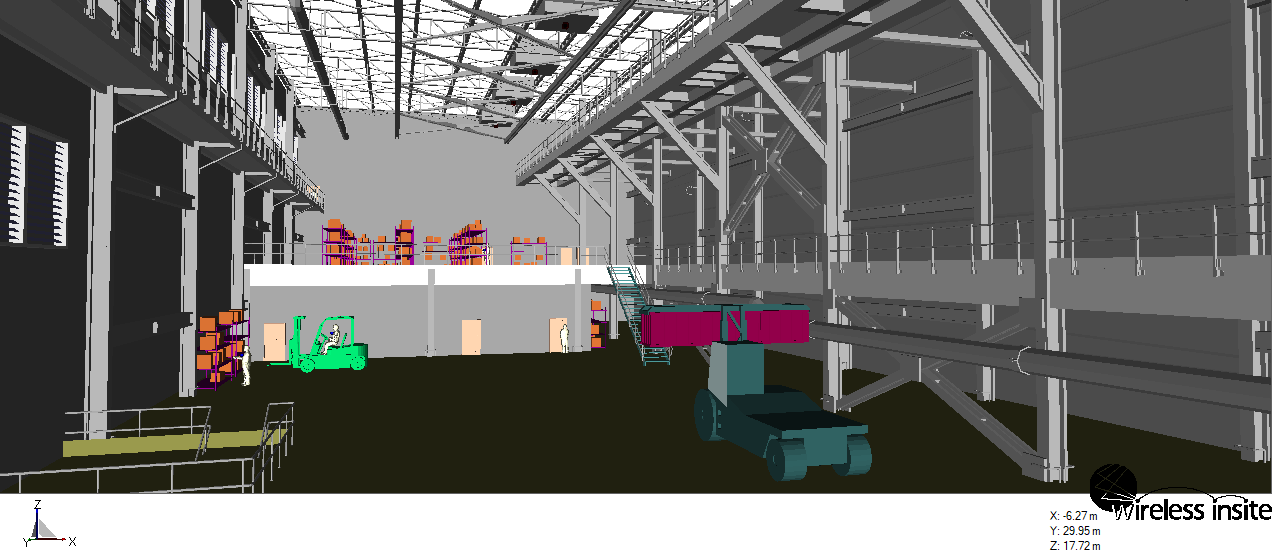
The fifth generation (5G) mobile networks with enhanced connectivity and positioning capabilities play an increasingly important role in automated vehicle-to-everything (V2X) and other advanced industrial Internet-of-Things (IoT) verticals. In this article, we address the prospects of 5G New Radio (NR) sidelink based V2X networks and their applicability for increasing the situational awareness, in terms of continuous tracking of moving connected machines and vehicles, in industrial IoT systems. For increased system flexibility and fast deployments, we assume that the locations of the so-called anchor nodes are unknown, and describe an extended Kalman filter-based joint positioning and tracking framework in which the locations of both the anchor nodes and the target nodes can be estimated simultaneously. We assess and demonstrate the achievable 3D positioning and tracking performance in the context of a realistic industrial warehouse facility, through extensive ray-tracing based evaluations at the 26 GHz NR band. Our findings show that when both angle-based and time-based measurements are utilized, reaching sub-1 meter accuracy is realistic and that the system is also relatively robust against different node geometries. Finally, several research challenges towards achieving robust, high-performance and cost-efficient positioning solutions in the industrial IoT context are outlined and discussed, identifying various potential directions for future research.
Submitted to IEEE Internet of Things Magazine
Videos and Demonstrations
Video demonstrations of the joint positioning and tracking approach
In the above video, time difference of arrival (TDoA) and angle of arrival (AoA) measurements are utilized in an extended Kalman filter (EKF) for joint positioning and tracking of both target and anchor nodes.
Specifically, the two plots on the left illustrate the positioning performance of a multi-target system (top plot -> 2D, bottom plot -> vertical) where there are two target nodes (cyan star and diamond markers) being involved, whereas the two plots on the right are the positioning performance of a single-target system where only one target node (cyan diamond marker) is considered. In this video, we consider overall six anchor nodes in a beneficial geometry dilution of precision (GDoP). In addition, all anchor nodes are located on the same height, and illustrated with the red circle markers. Furthermore, the blue diamond and magenta star markers (on the left plots) are the estimated locations of the two target nodes, while the red diamond marker (in the right plots) refers to the location estimates of the only target node in the single-target system. In both cases, the green ellipses are indicating the 95% uncertainty in the obtained location estimate. Additionally, the cross markers therein represent the estimated locations of the anchor nodes (solid lines with different colors are applied to connect the estimates with the corresponding anchor nodes in 2D plots).
Last but not least, the plots in the middle refer to the cumulative density function (CDF) of the positioning error on the 2D plane and vertical direction, in which, black curves are showing the estimation performance of the multi-target system (solid curve represents the targets and dashed curves refer to the anchors), whereas the red ones are showing the estimation performance of single-target system. We emphasize that the results presented in the videos applies for this specific realization only, the performance cannot be directly generalized.
The parameters utilized in the simulation:
The OFDM-based pilot signal is transmitted at 26 GHz with 100 MHz bandwidth (60 kHz sub-carrier spacing) and 0 dBm transmit power. Meanwhile, two 8 x 8 URAs (back to back) are assumed for each anchor node. The update time-interval is set at 100ms.