
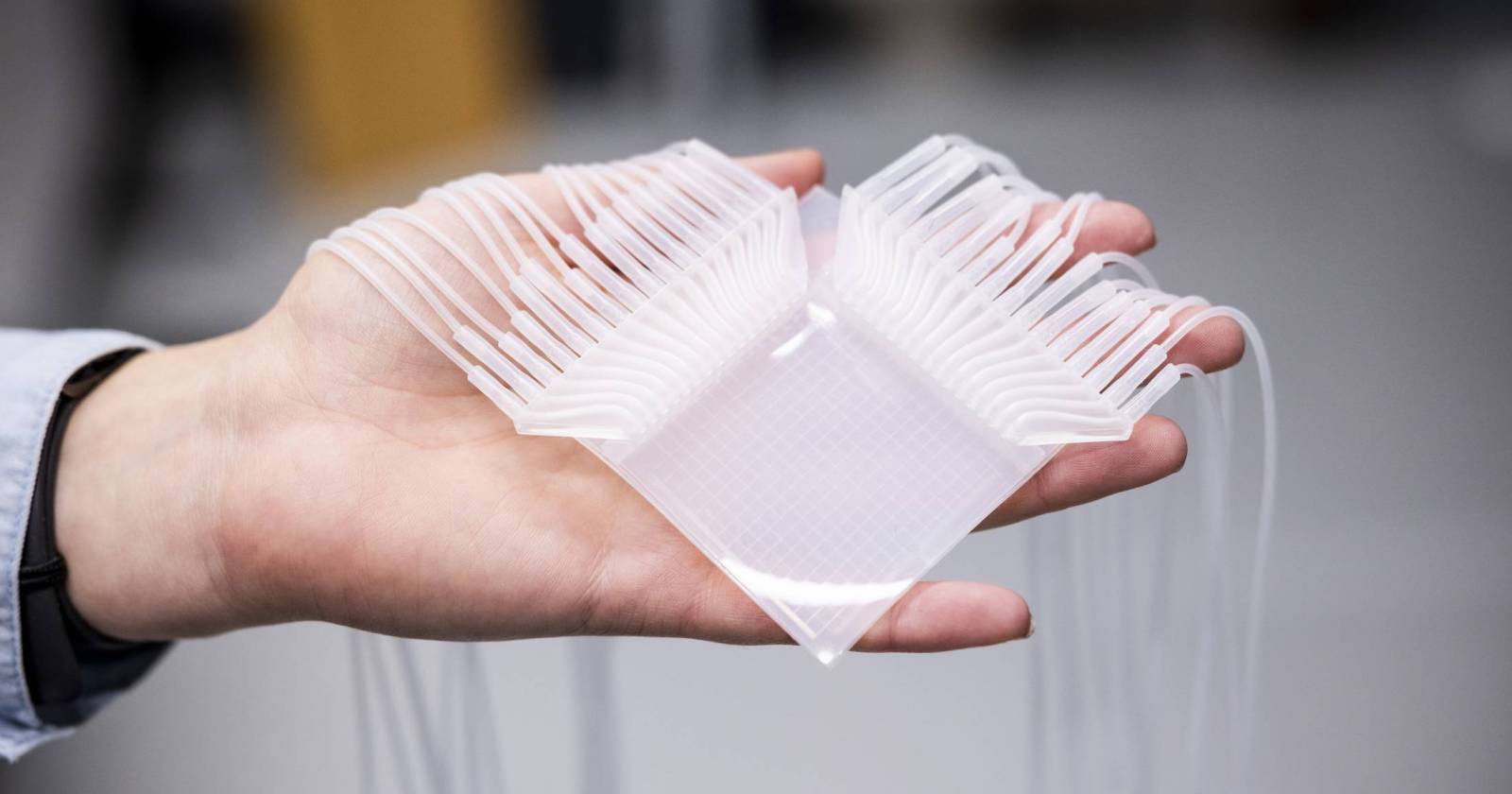
Large-scale integration of soft robotic and fluidic devices

This project studies the computer-aided design of soft robotic and fluidic devices. In the project, we develop a new abstract language to describe soft robots, and a compiler to convert these descriptions into layouts and designs of soft robotic and fluidic devices. The project also develops and optimizes microfabrication processes that can be used fabricate the devices, based on the designs.
Sticky soft robots

This project studies materials and surfaces for a soft robot contacting a substrate. As a practical application and demonstration of the project, we will target soft robotic manipulators (‘robot hand’), which could pick and release objects just by touch, especially for surgical applications of manipulating soft tissue.
Acoustofluidic microrobots
In this project, we use ultrasonic standing waves to manipulate particles and drops in microfluidic devices. The objects are controlled in closed-loop by machine vision feedback. We target devices where all transducers and sensors are decoupled from the chip, so that the chip can be very cheap and disposable. The practical applications of such chips will be in point of care analytics and cell biology.