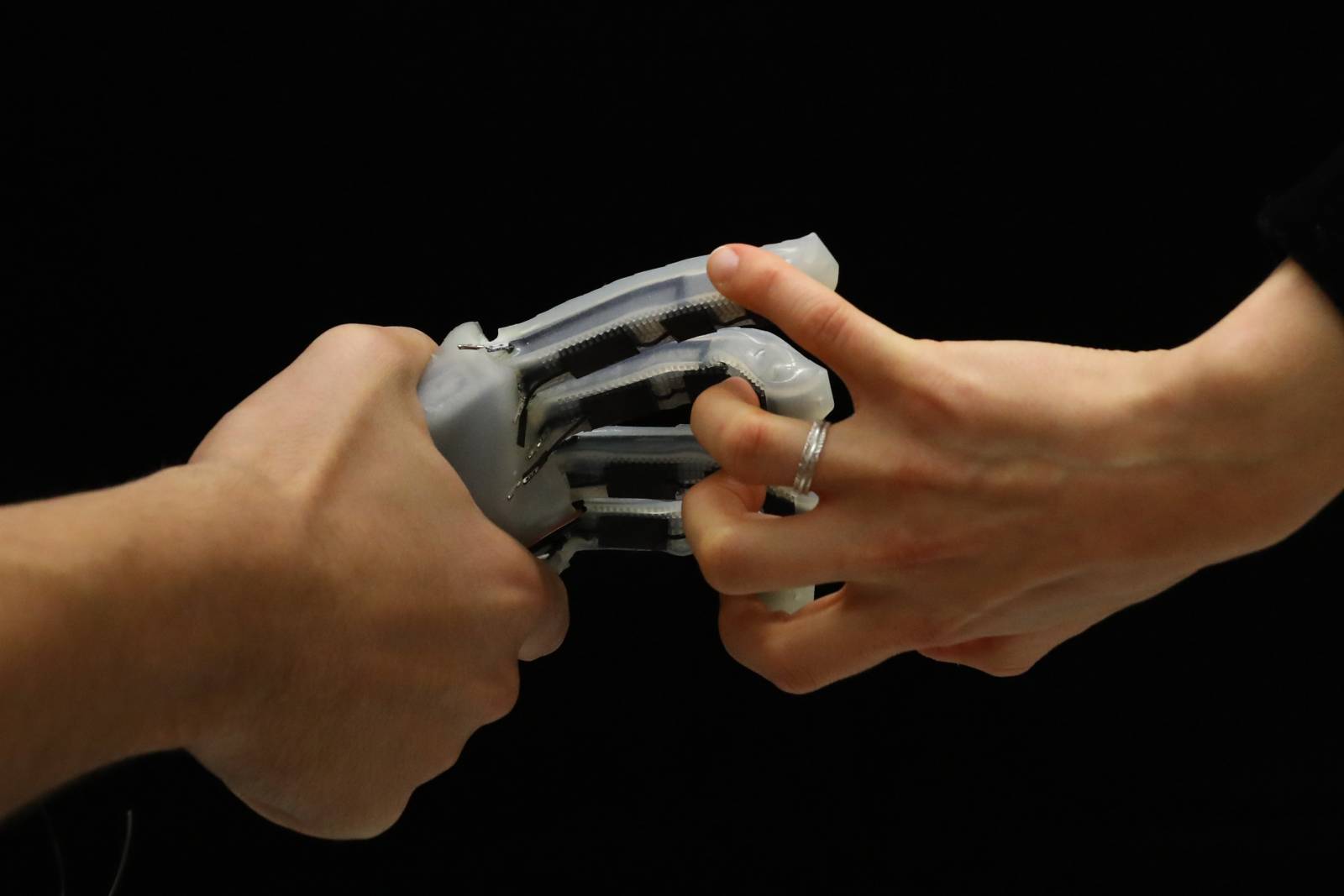
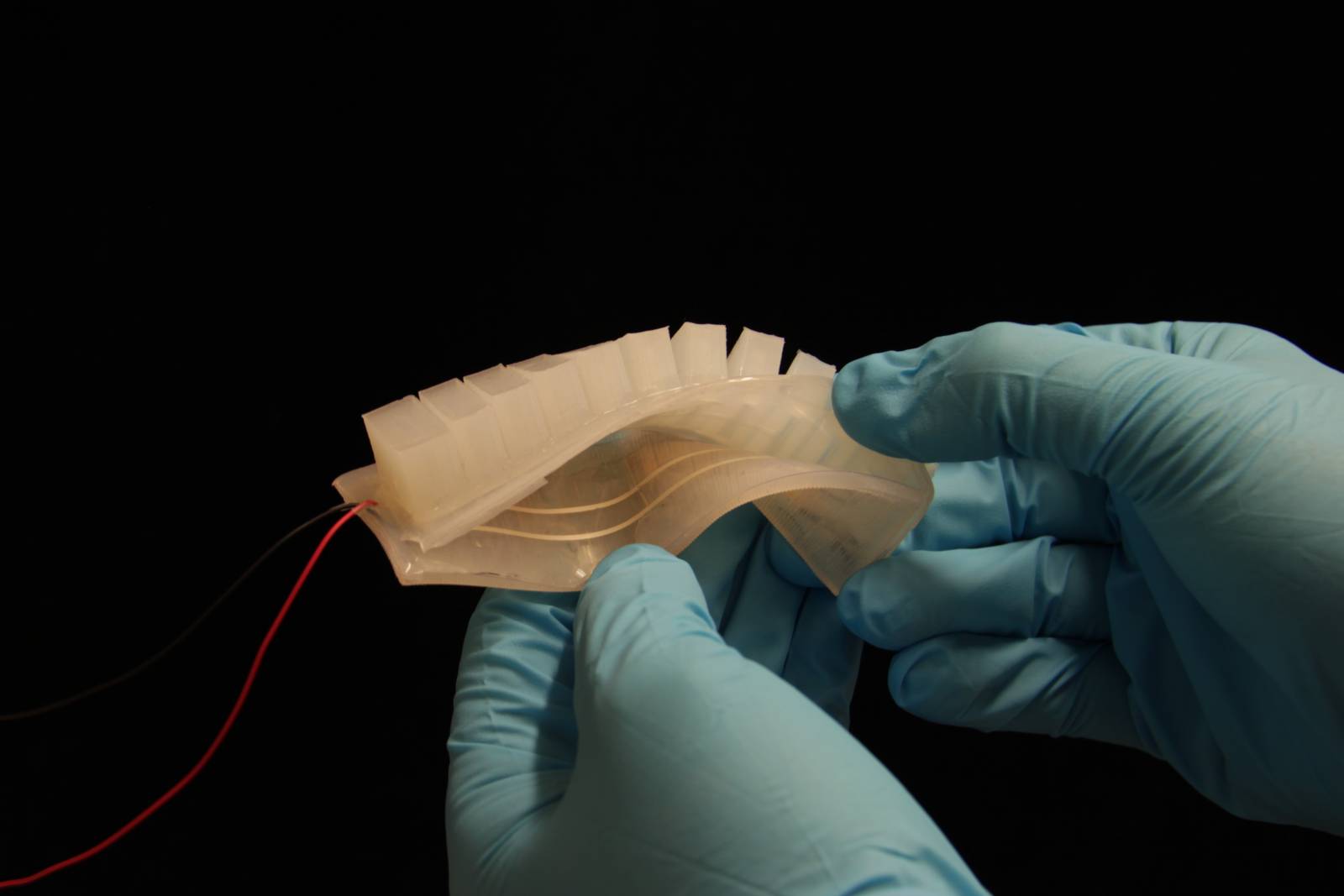
Sticky soft robots
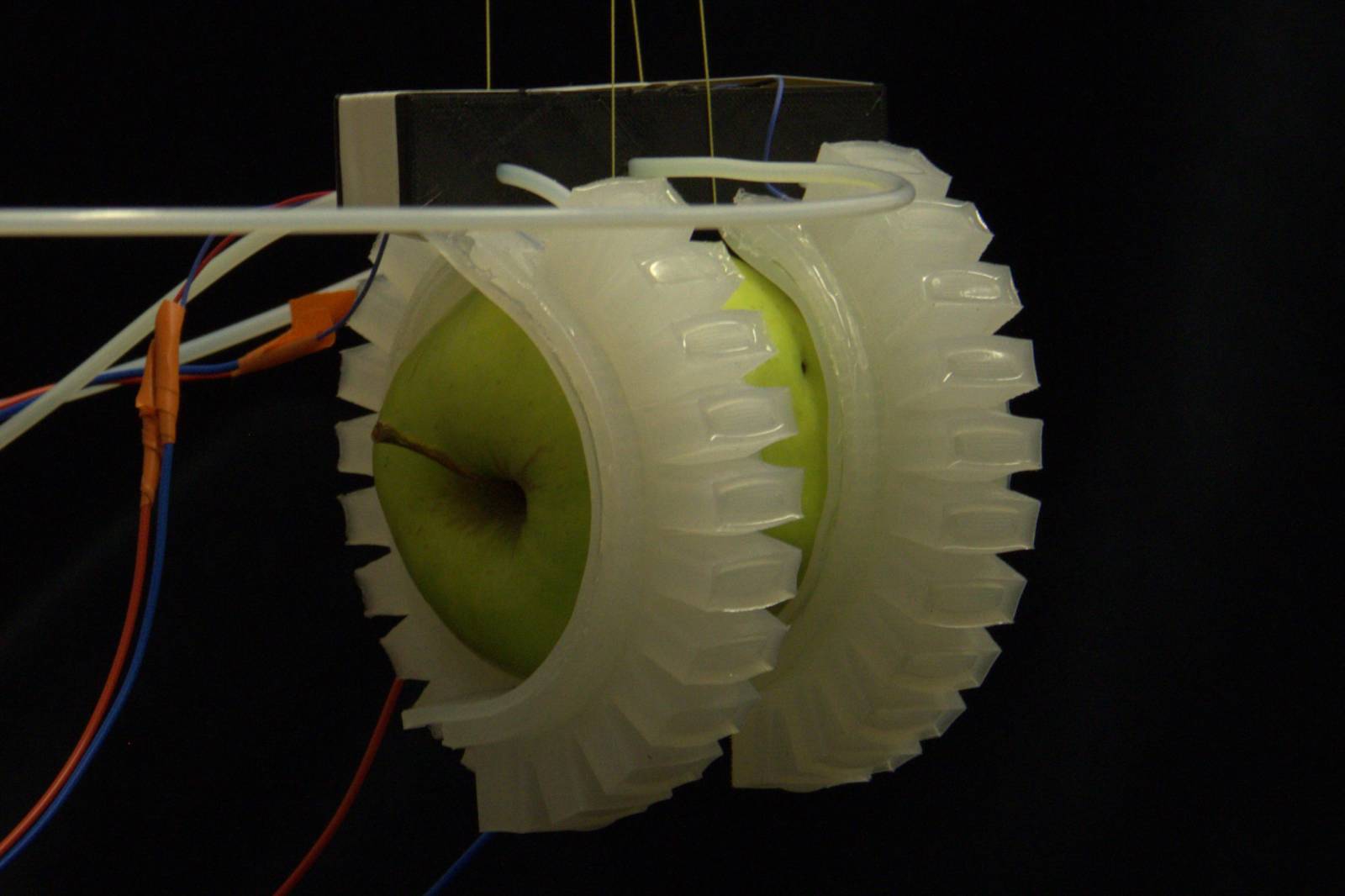
This project studies materials and surfaces for a soft robot contacting a substrate. As a practical application and demonstration of the project, we will target soft robotic manipulators (‘robot hand’), which could pick and release objects just by touch, especially for surgical applications of manipulating soft tissue.