 Title: User Experience and Interaction Design for Non-Anthropomorphic Robots in Work Contexts
Title: User Experience and Interaction Design for Non-Anthropomorphic Robots in Work Contexts
Date of defense: 2026-03-20
Opponent: Ilona Buchem
Reviewers: Astrid Weiss, Wafa Johal
Supervisors: Kaisa Väänänen, Aino Ahtinen, Roel Pieters
Robots are increasingly deployed in work environments such as hospitals, factories, and logistics facilities, yet their limited expressive capabilities often lead to challenges in communication, transparency, and role interpretation. While non-anthropomorphic robots express functional intent and avoid issues associated with human-like designs, they can also hinder effective interaction, particularly among users who lack familiarity with robots. Research on the user experience of such robots in real work contexts remains limited, creating a gap in understanding how workers perceive, interpret, and collaborate with these systems.
The goal of this thesis is two-fold. First, it explores the current user experiences of non-anthropomorphic robots in the workplace and identifies UX factors that inform the design of interactions with such robots. Second, this thesis develops a design model and a practical design tool for robot interaction designers. The thesis addresses three research questions: 1. What are the user experiences of non-anthropomorphic robots in the context of work? 2. What factors influence the user experience of non-anthropomorphic robots in workplace environments? 3. How can these UX factors inform the design of non-anthropomorphic robot interactions? The work integrates four empirical studies conducted in workplace contexts: three qualitative and one mixed-method.
Study 1 identifies core user-experience themes when user collaborate with a robot arm, including safety, trust, accomplishment, confusion, and emergent fellowship. Study 2 shows that a clear robot role, context-appropriate personality, and playful interactions can improve acceptance and interaction fluency. Study 3 demonstrates that personality-relevant behavior may positively affect acceptance of a non-anthropomorphic wellness robot even when the intended personality is not explicitly recognized by users. Study 4 identifies ten context-dependent robot communication themes and shows that the same light, motion, or sound cues are interpreted differently by users across scenarios, emphasizing the need for adaptive, context-sensitive signaling.

 The School of Information Sciences publishes the Dissertation in Interactive Technology series (ISSN 1795-9489). Before 2005, dissertations in the HCI field were published in the report series of the (then) Department of Computer Sciences. Also after 2005 some dissertations have been published elsewhere, e.g. in the report series of the employer of the doctoral candidate.
The School of Information Sciences publishes the Dissertation in Interactive Technology series (ISSN 1795-9489). Before 2005, dissertations in the HCI field were published in the report series of the (then) Department of Computer Sciences. Also after 2005 some dissertations have been published elsewhere, e.g. in the report series of the employer of the doctoral candidate.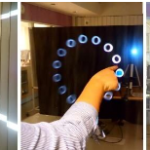 Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title: 

 Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title:  Title:
Title: