
Heavy-duty working machines that are intensively used, e.g., in contruction, mining, forestry and cargo-handling industries, constitute huge global markets and the machines have significant importance to Finland’s economy and industry. In these risk-intensive industries, robotics and automation are consider as the next big revolution with significant impacts on the machines productivity, production quality, reliability and safety .

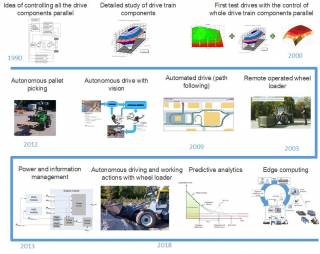
Innovative Hydraulic and Automation (IHA) has been studied remotely or autonomously operated off-road vehicles since 2000. There are several research milestones of the unit in this field, see figure below. It is obvious that the domain knowledge for the machines and process how these are working is essential to carry out the research.
For the energy point of view the main contributions are the idea of controlling all the drive components parallel, detailed study of hydraulic pumps and motors and diesel engine, test drives with the control of whole drive train components parallel, applying digital hydraulics to boom actions in wheel loader and optimizing algorithms for power/energy use in a wheel loader. Towards autonomous use of wheel loader following operations have been made: Remotely operated machine, automated drive with path following ability, autonomous drive with vision, autonomous pallet picking and finally joining the autonomous bucket filling and drive.
Contact persons
Reza Ghabcheloo
Associate Professor
reza.ghabcheloo@tuni.fi
+358 4 0849 0346
Main Publications
- J. Backas, and R. Ghabcheloo. “Nonlinear model predictive energy management of hydrostatic drive transmissions.” Proc. Inst. Mech. Eng., Part I: J. Syst. Contr. Eng., vol. 233, no. 3 (2019): 335-347.
- A.K. Singh, A. Ahonen, R. Ghabcheloo, and A. Muller. “Inducing Multi-Convexity in Path Constrained Trajectory Optimization for Mobile Manipulators.” in Conference on Decision and Control (CDC), Nice, France, (2019). [arXiv]
- E. Halbach, J. Kämäräinen, and R. Ghabcheloo, “Neural Network Pile Loading Controller Trained by Demonstration.” in IEEE Int. Conf. on Robotics and Automation (ICRA), Montreal, Canada, (2019).
- K. Huhtala. “Autonomous energy efficient wheel loader research at TUT.” International Journal of Hydromechatronics, vol. 1, no. 1 (2018): 107-125.
- T. Krogerus, M. Hyvönen, and K. Huhtala. “Analysis of common rail pressure signal of dual-fuel large industrial engine for identification of injection duration of pilot diesel injectors.” Fuel, vol. 216 (2018): 1-9.
- J. Backas, R. Ghabcheloo, and K. Huhtala. “Gain scheduled state feedback velocity control of hydrostatic drive transmissions.” Control Engineering Practice, vol. 58 (2017): 214-224.
- M. M. Aref, R. Ghabcheloo, A. Kolu, and J. Mattila. “A multistage controller with smooth switching for autonomous pallet picking.” In IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2535-2542. (2016).
- J.-W. Choi, and K. Huhtala. “Constrained global path optimization for articulated steering vehicles.” IEEE Trans. Veh. Technol., vol. 65, no. 4 (2015): 1868-1879.
- M. Hyvönen, M. Rajala, A. Virtanen, J. Jankkari, K. Huhtala, and R. Ritala. “Assistive situation awareness system for mobile multimachine work environments.” IEEE Trans. Intell. Transp. Syst., vol. 16, no. 6 (2015): 3403-3413.