
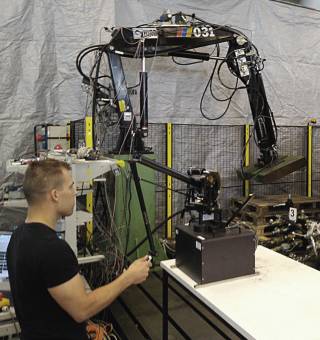
IHA is one of the leading institutions in advanced control of hydraulic robotic manipulators. Our theoretically-sound control designs have demonstrated multiple state-of-the-art control performance improvements with hydraulic robotic manipulators’ in their
- Free-space motion control,
- Impedance control and Hybrid motion/force control,
- Bilateral teleoperation,
- Learning from demonstration,
- Energy-efficient and high-precision control (with independent metering).

Contact person
Jouni Mattila
Professor
jouni.mattila@tuni.fi
+358 40 849 0244
Main Publications
- J. Mattila, J. Koivumäki, D. G. Caldwell, and C. Semini. “A survey on control of hydraulic robotic manipulators with projection to future trends.” IEEE/ASME Trans. Mechatronics, vol. 22, no. 2 (2017): 669-680.
- J. Koivumäki, W.-H. Zhu, and J. Mattila. “Energy-efficient and high-precision control of hydraulic robots.” Control Engineering Practice, vol. 85 (2019): 176-193. [Open Access]
- M. Suomalainen, J. Koivumäki, S. Lampinen, V. Kyrki, and J. Mattila. “Learning from demonstration for hydraulic manipulators.” in IEEE/RSJ Int. Conf. on Intell. Robots and Systems (IROS), pp. 3579-3586. (2018).
- M.M. Aref, and J. Mattila. “Deep Learning of Robotic Manipulator Structures by Convolutional Neural Network.” in 9th Int. Conf. on Intell. Control and Information Processing (ICICIP), pp. 236-242. IEEE, 2018.
- J. Koivumäki, and J. Mattila. “Stability-guaranteed force-sensorless contact force/motion control of heavy-duty hydraulic manipulators.” IEEE Trans. Robot., vol. 31, no. 4 (2015): 918-935.